現物からCAD作成のリバースエンジニアリングプロセス
HOME >リバースエンジニアリングの概要
3DスキャンからCADモデリングまでのプロセス
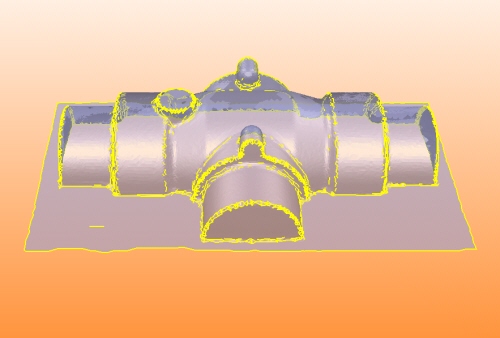
形状を3Dスキャンします。 |
||||
|
||||



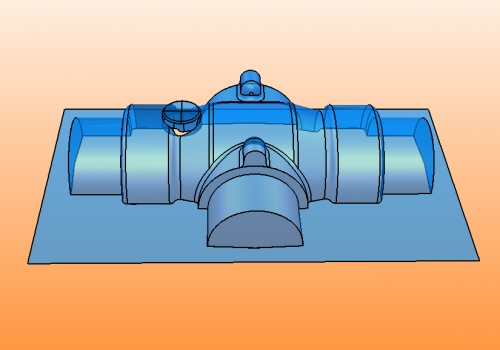
スキャンデータからCADを作成します。 |
||||
|
||||
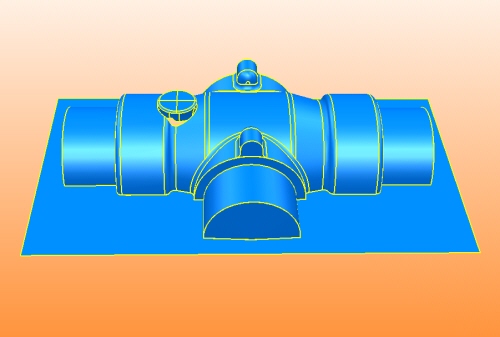
目的にあわせたソリューションを提供できます。 |
||||
|
||||
形状を3Dスキャンします。 |
||||
|
||||
スキャンデータからCADを作成します。 |
||||
|
||||
目的にあわせたソリューションを提供できます。 |
||||
|
||||