3Dスキャンの基本原理

3Dスキャンとは、対象物の形状を非接触または接触式で計測し、立体的なデジタルデータとして取得する技術です。従来の寸法測定では、長さ・幅・高さなど限られた点を測ることが中心でしたが、3Dスキャンでは対象物の表面全体を多数の点として読み取り、複雑な形状や曲面、微細な凹凸まで高精度に記録できます。

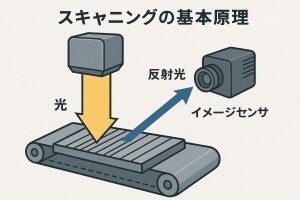
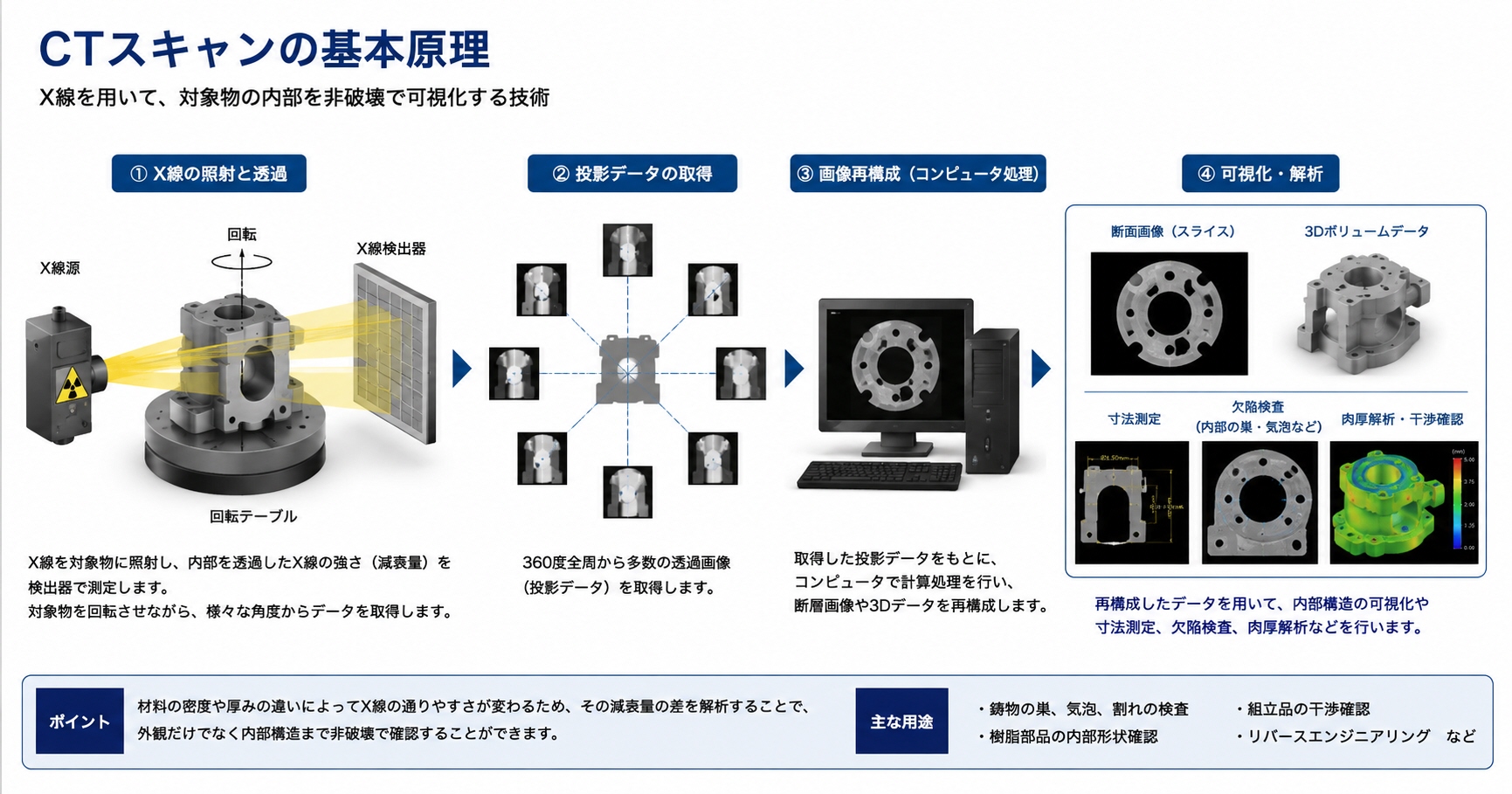
基本原理は、対象物にレーザー光やパターン光を照射し、その反射光や画像の変化をセンサーやカメラで読み取ることです。取得した情報をもとに、コンピューターが各点の位置座標を計算し、点群データとして再構成します。この点群をつなぎ合わせることでポリゴンメッシュが作成され、さらに用途に応じてCADデータや検査用データへ変換されます。

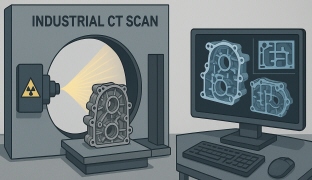
代表的な方式には、レーザー式、光学式、CTスキャン式などがあります。レーザー式は反射光の角度や距離を利用して形状を計測し、工業部品や金型、大型部品の測定に適しています。光学式は縞模様などのパターン光を投影し、変形した模様をカメラで解析することで表面形状を取得します。短時間で広い範囲を測定できるため、製品検査やリバースエンジニアリングに多く活用されています。CTスキャン式はX線を利用し、外形だけでなく内部構造や空洞、肉厚、欠陥まで確認できる点が大きな特長です。

3Dスキャンの利点は、図面のない現物や、手作業で作られた部品、摩耗・変形した金型などをデジタル化できることです。取得したデータは、寸法検査、CAD化、品質管理、部品の復元、設計変更、金型修正、3Dプリンター用データ作成など、幅広い工程で利用できます。特に複雑な自由曲面を持つ部品では、手作業による測定よりも効率的で、形状全体を客観的に把握できる点が大きなメリットです。

ただし、3Dスキャンは単に機械で読み取れば完成する技術ではありません。光沢面、黒色面、透明素材、深い穴、隠れた裏側などは測定が難しい場合があります。そのため、対象物の材質や形状に合わせた測定方法の選定、スキャン角度の調整、ノイズ除去、データ補正、基準合わせなどが重要になります。

3Dスキャンの基本原理を理解することで、取得したデータをどのように活用できるかが明確になります。現物を正確にデジタル化することは、製造業における品質向上、設計効率化、部品再現、保守管理に大きく貢献します。3Dスキャンは、現物とデジタル設計をつなぐ重要な技術として、ものづくりの現場でますます活用が広がっています。
|
基本的
光とイメージセンサに基づく3Dスキャン技術には、主に以下のような方法があります。ストラクチャードライトスキャニング: 特定のパターンの光(格子状やストライプ状)をオブジェクトに投影し、その光がオブジェクトの表面でどのように歪むかをイメージセンサで捉えます。この歪みから、オブジェクトの3D形状を計算します。
応用分野
光とイメージセンサによるスキャン技術は、多岐にわたる分野で応用されています。産業: 自動車、航空宇宙、製造業での品質管理や部品の検査に使用されます。文化財保護: 歴史的建造物や芸術作品のデジタルアーカイブ作成に貢献します。
技術の進歩
最新の研究や開発により、スキャン技術はますます精度が向上し、より速く、より安価になりつつあります。AIや機械学習の統合によって、スキャンデータの処理や解析が自動化され、より効率的なワークフローが可能になっています。
光とイメージセンサによるスキャンは、現実世界をデジタルの形で捉える強力な手段であり、その可能性はまだまだ拡がっています。
 |
|


| 光学式スキャニング,反射光をカメラで捉える | レーザー式スキャニング,反射光をセンサーで検知 | CT式スキャニング,透過データをコンピュータ処理 |
|---|---|---|
 |
 |
 |
 |
 |
| <3Dスキャンページへ> |